True - but it’s not going to help - especially as the fast mode I2C narrows the acceptable range of resistor pull-ups values - combined with a variable number of bus units lowers the margins for successful comms - even if all the devices fully meet the I2C specifications.
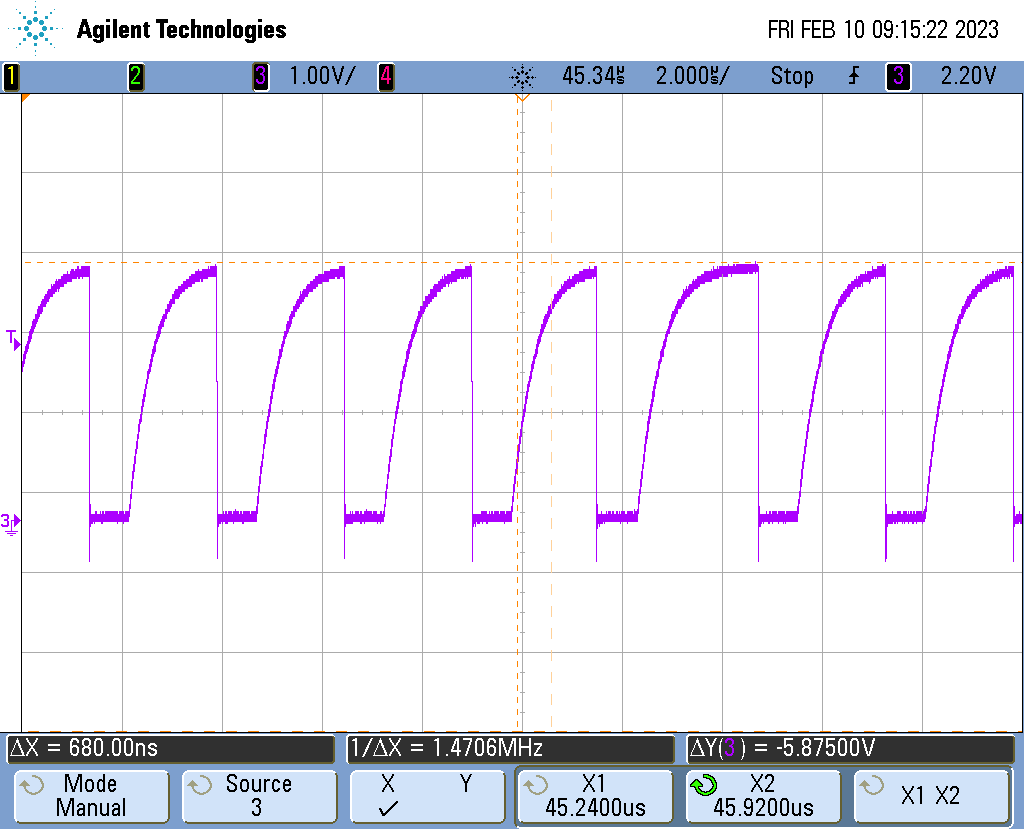
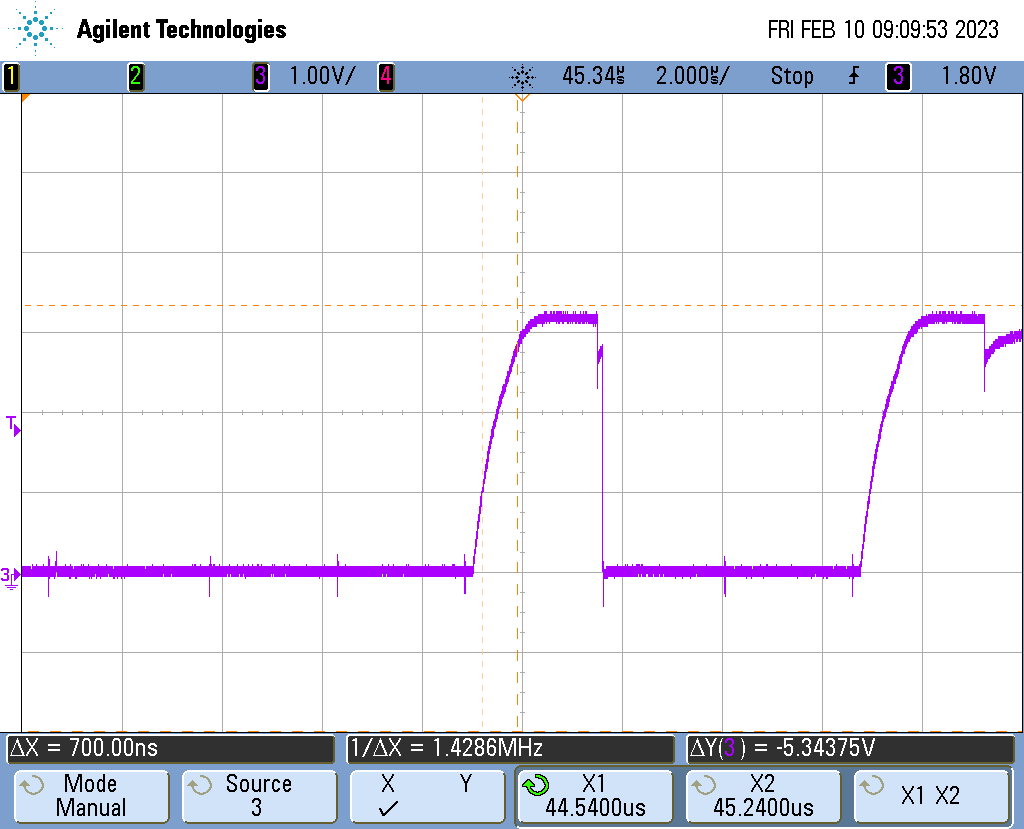
Rise time: "the maximum rise time for standard mode and fast mode is 1,000 ns and 300 ns, respectively. "
This App note mentions quite a few issues, that again can be related to sub-optimal layout and subsequent margins.
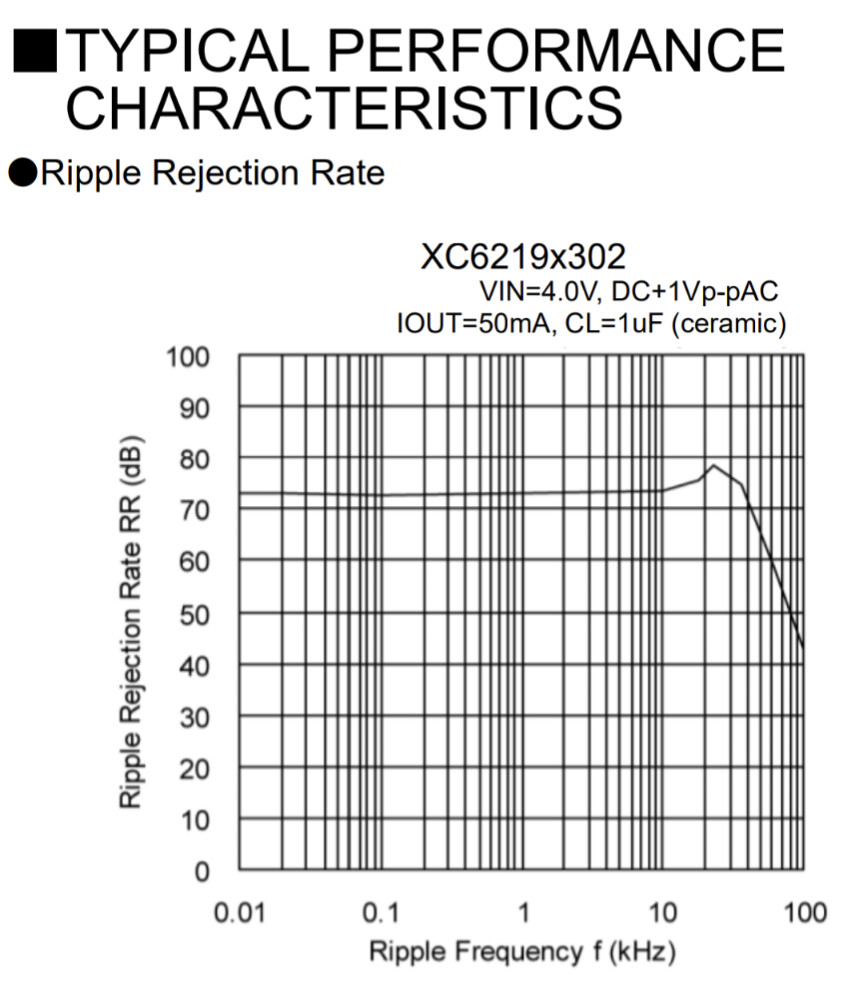
In any case - for the modules themselves, a good voltage source would be nice to avoid PSRR from cross-modulating on the measurements (unless real care has been taken in the decoupling choices).
The 5V stuff should probably have had a level translator on the I2C comms (yes - it “can” work but again the margins become very small).
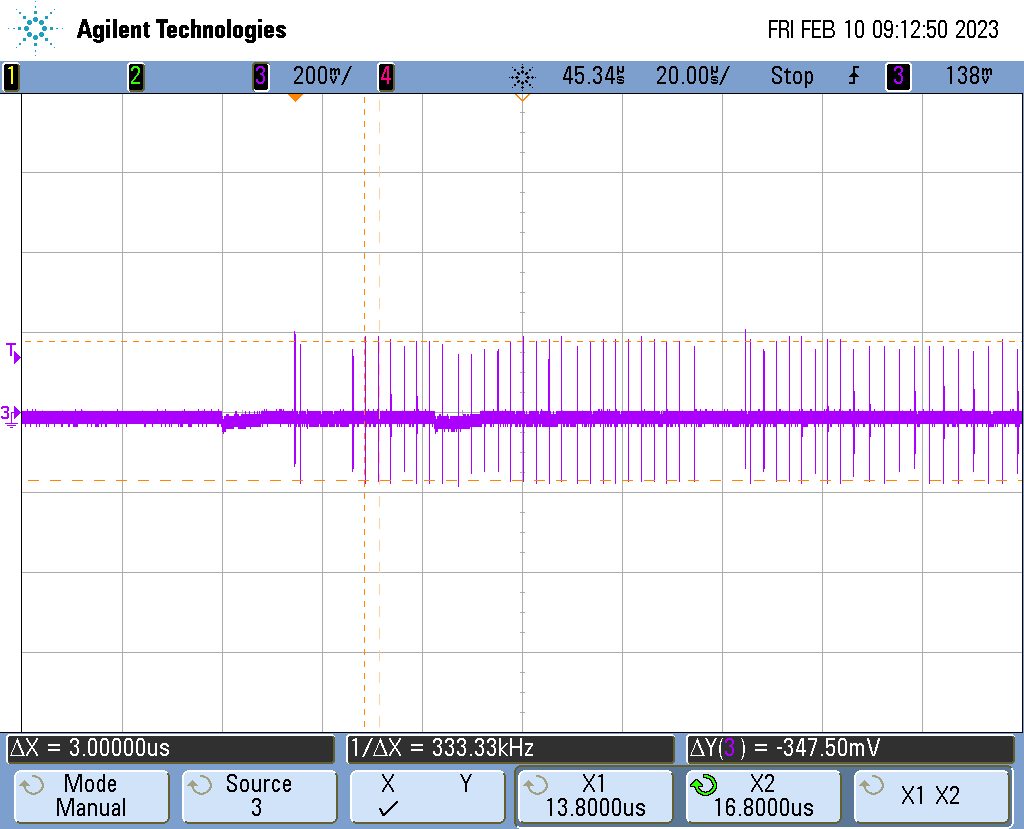
I also think that running SCLK lines far from ground is a bad neighbourly thing to do w.r.t. EMI / EMC, so this probably could not ever be made CE compliant. In addition this may be another source of intermittent problems as the traces can pick up EM signals, and rectify them, causing glitches. By running them near a ground plane the loop areas are reducing, inducing less current through the trace and thus less voltage.
Now, can the AirGradient PRO work? Sure, it can - but unless I see a design document that showed someone had put some engineering thought into it I would not have let it go through design review.
Even with my own little projects, I write down some sentences and perform some calculations (especially with mixed 3.3V /5V systems).
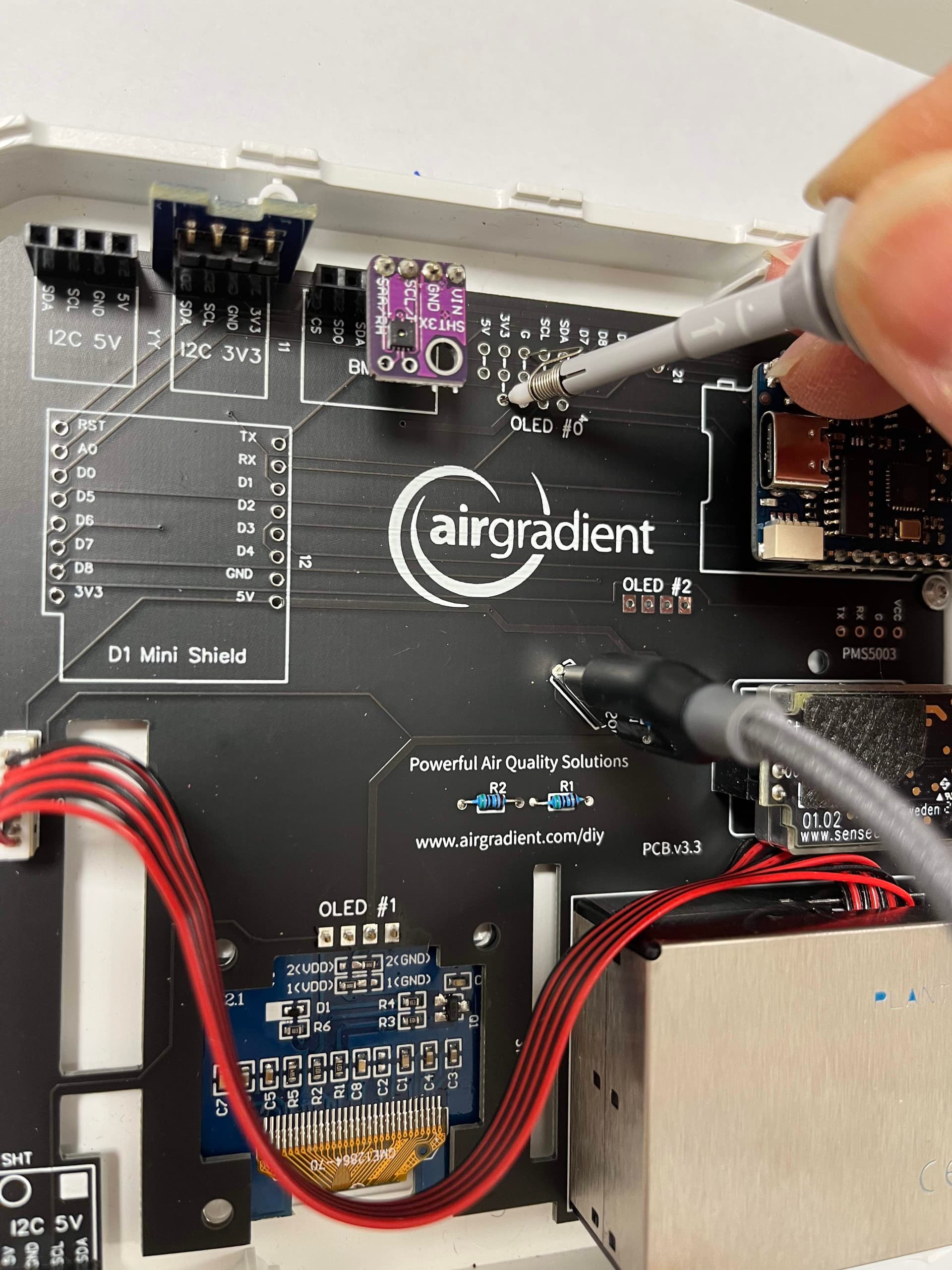
My SHT3x (PU removed) works in the top left 5V socket, but not in the bottom 5V socket…
In any caes both my digital scopes are at work - and TBH I’m not that interested to debug a design that I think is fundamentally flawed.
Due to postage cost and import taxes I bought 3 - Pro kits in the belief it would save me the time of doing design myself (especially the SW framework).
Therefore I’m doing a quick PCB myself now, with a few additional 3.3V headers, a well-decoupled 3.3V rail with its own 5V - 3.3V regulator with good, broadband PSRR (who knows what the USB power supply spits out) and external caps at each I2C node, so that I’m not reliant on the lowest bidder X5R or worse caps fitted on most boards. This way I can re-use the SW, modules and the nice case.
I’m analog and systems designer, but I’ve done my share of high speed digital and PCB design.
All of this of course in my own opinion and I’m supportive of the aims of this project, so I’m keen to get the ones that I invested in working (also so that I can send one to my older asthmatic family member - I would be interested to see if their symptoms are correlated to the PM2.5 and CO2 levels)